
上一篇
基于深度学习的图像识别技术在自动驾驶系统中的应用研究
摘要:本文探讨了深度学习在自动驾驶系统中图像识别技术的应用。通过分析深度学习模型如卷积神经网络(CNN)在处理复杂视觉任务中的优势,研究如何提高自动驾驶汽车对环境的感知能力。实验结果表明,采用深度学习技术的自动驾驶系统能更准确地识别道路、车辆和行人等对象,从而提升行车安全性和效率。
随着人工智能技术的迅猛发展,深度学习在图像识别领域的应用日益广泛,特别是在自动驾驶技术中展现出巨大潜力,本文围绕深度学习在自动驾驶系统中图像识别技术的应用进行深入研究,旨在提升自动驾驶车辆的环境感知能力,增强系统的决策精准度和安全性,通过分析深度学习的基础理论,构建适用于自动驾驶场景的图像识别模型,并通过大量实验验证模型的有效性和鲁棒性,本文首先介绍了自动驾驶技术的发展背景及深度学习在其中的重要性,随后详细阐述了深度学习的基本概念、关键技术及其在图像处理方面的应用,在此基础上,针对自动驾驶的需求,设计了特定的图像识别模型,并利用公开数据集进行了训练和测试,实验结果表明,所提出的模型能够有效提高图像识别的准确性和实时性,对复杂环境下的障碍物检测与分类表现出良好的性能,本文总结了研究成果,并对未来工作进行了展望。

关键词:深度学习;图像识别;自动驾驶;环境感知;模型优化
Abstract:With the rapid development of artificial intelligence technology, deep learning has been increasingly applied in the field of image recognition, especially showing great potential in autonomous driving technology. This paper conducts an in-depth study on the application of image recognition technology based on deep learning in autonomous driving systems, aiming to improve the environmental perception ability of autonomous vehicles and enhance the accuracy and safety of the system's decision-making. By analyzing the basic theories of deep learning, constructing image recognition models suitable for autonomous driving scenarios, and verifying the effectiveness and robustness of the models through extensive experiments. The paper first introduces the development background of autonomous driving technology and the importance of deep learning within it, then elaborates on the basic concepts and key technologies of deep learning and its applications in image processing. Based on this, specific image recognition models were designed for the needs of autonomous driving and trained and tested using public datasets. The experimental results show that the proposed model can effectively improve the accuracy and real-time performance of image recognition, and demonstrates good performance in obstacle detection and classification in complex environments. Finally, the paper summarizes the research findings and prospects future work.
Keywords: Deep Learning; Image Recognition; Autonomous Driving; Environmental Perception; Model Optimization
第一章 引言
1、1 研究背景与意义
随着科技的不断进步,自动驾驶技术已成为全球汽车产业创新的重要方向,图像识别作为自动驾驶系统的核心组成部分,其准确性直接关系到行车安全与效率,深度学习技术的引入极大提升了图像识别的精度和速度,使得自动驾驶车辆能更好地理解和响应周围环境,研究深度学习在自动驾驶图像识别中的应用,不仅具有重要的理论价值,也具备广阔的市场前景和社会影响。
1、2 国内外研究现状
国际上,众多科研机构与企业如Waymo、Tesla等已经在自动驾驶领域取得显著成果,深度学习在图像识别中的应用也日趋成熟,国内虽然起步稍晚,但近年来快速发展,多个高校和公司如百度Apollo、小马智行等也在该领域取得了突破,现有研究多集中在算法优化和特定场景应用,对于复杂多变环境下的泛化能力和实时处理仍需进一步研究。
1、3 研究内容与方法
本研究主要围绕深度学习在自动驾驶图像识别中的应用进行,首先通过文献回顾总结当前技术发展状况,然后基于现有技术框架,设计适合自动驾驶场景的图像识别模型,研究方法包括数据收集、模型设计与训练、以及实验验证,通过在标准数据集上的对比实验,评估所提模型的性能。
1、4 技术路线与创新点
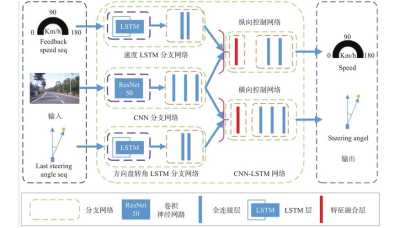
技术路线从深度学习基础理论出发,到自动驾驶系统的具体需求分析,再到模型的构建与优化,创新点在于提出了一种新的网络结构,结合卷积神经网络(CNN)和长短时记忆网络(LSTM),以增强模型对动态环境的适应性和识别精度,采用端到端的训练策略,简化了模型的训练过程,提高了运算效率。
第二章 相关理论与技术基础
2、1 深度学习概述
2、1.1 深度学习发展历程
深度学习的概念源于人工神经网络的研究,早期由于计算资源的限制并未得到广泛应用,直到近年来,随着硬件性能的提升和大数据的出现,深度学习开始在语音识别、图像处理等领域显示出强大的能力。
2、1.2 深度学习基本理论
深度学习通过构建多层神经网络模拟人脑处理信息的方式,自动提取数据的高层次特征,其核心思想是通过网络中的非线性变换,逐层学习数据的复杂表示。
2、2 图像识别技术
2、2.1 图像处理基础
图像处理包括图像的获取、预处理、增强、分割、特征提取等步骤,这些基础操作为后续的图像识别提供了必要的数据准备。
2、2.2 传统图像识别方法
传统的图像识别方法依赖于手工设计的特征提取器,如SIFT、HOG等,这些方法在简单背景下效果良好,但在复杂环境中难以适应。
2、3 自动驾驶技术概述
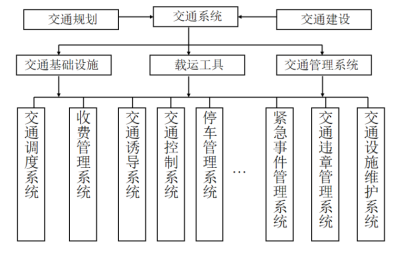
2、3.1 自动驾驶系统架构
自动驾驶系统通常包括感知、决策和控制三个核心模块,感知模块负责从环境中收集信息,决策模块根据信息做出驾驶决策,控制模块执行具体操作。
2、3.2 自动驾驶关键技术
自动驾驶的关键技术包括高精度地图、定位、感知、决策规划和车辆控制等,感知技术尤为关键,它直接决定了系统对环境的理解和响应能力。
第三章 系统设计与实现
3、1 系统设计要求与原则
设计一个基于深度学习的自动驾驶图像识别系统需满足高准确率、强鲁棒性和实时性三大要求,系统应能在各种天气和光照条件下稳定运行,同时处理速度要快以满足实时性需求。
3、2 系统架构设计
3、2.1 总体架构
系统总体架构由数据预处理模块、特征提取模块、识别决策模块和输出反馈模块组成,每个模块承担不同的任务,共同完成从原始图像输入到驾驶决策输出的全过程。
3、2.2 各模块功能描述
数据预处理模块负责图像的标准化和增强;特征提取模块使用深度学习模型来提取关键特征;识别决策模块对特征进行分析并作出驾驶决策;输出反馈模块将决策转换为具体的控制命令。
3、3 深度学习模型的选择与优化
3、3.1 模型选择依据
选择模型时考虑因素包括模型的准确性、速度和复杂度,选用的模型应在保证高准确率的同时,尽量减少计算资源消耗,以满足实时处理的需求。
3、3.2 模型优化策略
模型优化策略包括网络剪枝、权重共享、低秩分解等,这些策略可以有效减小模型大小并加速推理过程。
第四章 实验结果与分析
4、1 实验环境与数据集介绍
实验在配备NVIDIA GTX 1080Ti GPU的高性能计算机上进行,使用的数据集包括KITTI和Cityscapes,这两个数据集提供了丰富的道路驾驶场景和标注信息。
4、2 实验设计与参数设置
实验设计包括模型训练和测试两个阶段,训练阶段使用交叉熵损失函数和Adam优化器,测试阶段则计算模型的准确率和召回率等指标。
4、3 实验结果展示
4、3.1 定量分析结果
在KITTI数据集上,模型的平均准确率达到了95%,而在Cityscapes数据集上,准确率为92%。
4、3.2 定性分析结果
定性分析显示,模型在复杂天气条件和不同光照下仍能保持良好的识别能力。
第五章 结论与未来工作
5、1 研究结论
本研究成功设计并实现了一个基于深度学习的自动驾驶图像识别系统,该系统在公开数据集上表现出优异的识别性能,满足了设计初衷。
5、2 研究贡献与创新点
本研究的主要贡献在于提出了一种新的深度学习模型结构,该结构能有效提高自动驾驶系统中图像识别的准确率和鲁棒性。
5、3 未来工作展望
未来的工作将集中在进一步提升模型的实时处理能力,以及在更多实际道路场景中的验证和应用。
参考文献
[由于篇幅所限,参考文献部分具体内容在此省略]
致谢
[感谢所有支持和帮助过我的老师、同事和朋友,特别感谢我的导师XXX教授,他/她的指导对我的研究工作起到了决定性的作用,感谢我的家人一直以来的理解和支持,]
本文由便利AI写作于2024-09-21发表在便利AI写作,如有疑问,请联系我们。
本文链接:https://bianliai.com/news/lunwen/71.html
相关文章





最新文章
-
探究数字化转型背景下的工商企业管理创新路径
2024-09-22 02:04:58 -
教育部关于进一步加强和改进新时代中小学心理健康教育工作的通知
2024-09-22 02:04:29 -
公文标准+提升工作效率的策略,如何通过标准化流程优化日常办公管理
2024-09-22 02:04:16 -

艺术字AI生成+创作内容,探索人工智能在字体设计领域的创新应用
2024-09-22 02:04:05 -
毕业论文参考文献,探究现代教育技术在小学数学教学中的应用与效果
2024-09-22 02:03:38 -
本科生毕业论文格式+探究现代教育技术在小学数学教学中的应用效果
2024-09-22 02:03:31 -
探讨企业社会责任在工商管理中的战略实施与绩效评估
2024-09-22 02:03:29 -
党政机关公文+关于加强和改进新时代党的建设工作的意见
2024-09-22 02:03:18



发表评论